Elastic force.
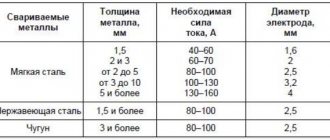
The author is a professional tutor, author of textbooks for preparing for the Unified State Exam Igor Vyacheslavovich Yakovlev
Topics of the Unified State Examination codifier: forces in mechanics, elastic force, Hooke's law.
As we know, on the right side of Newton’s second law is the resultant (that is, the vector sum) of all forces applied to the body. Now we have to study the forces of interaction between bodies in mechanics. There are three types: elastic force, gravitational force and friction force. We start with elastic force.
Examples of problems with solutions
Exercise. The spring in no load has a length of $l=0.01$ m and a stiffness equal to 10 $frac. $What will the spring stiffness and its length be equal to if a force $F$= 2 N is applied to the spring? Consider the spring deformation to be small and elastic.
Solution. The spring stiffness during elastic deformations is a constant value, which means that in our problem:
For elastic deformations, Hooke's law is satisfied:
[F=kDelta l left(1.2right).]
From (1.2) we find the extension of the spring:
The length of the stretched spring is:
Let's calculate the new length of the spring:
Answer. 1) $k'=10 frac$; 2) $l'=0.21$ m
Exercise. Two springs with stiffnesses $k_1$ and $k_2$ are connected in series. What will be the elongation of the first spring (Fig. 3) if the length of the second spring increases by $Delta l_2$?
Solution. If the springs are connected in series, then the deforming force ($overline$) acting on each of the springs is the same, that is, we can write for the first spring:
For the second spring we write:
If the left sides of expressions (2.1) and (2.2) are equal, then the right sides can also be equated:
[k_1Delta l_1=k_2Delta l_2left(2.3right).]
From equality (2.3) we obtain the elongation of the first spring:
Answer. $Delta l_1=frac$
Features of calculating the stiffness of spring connections
An important point is the calculation of several elastic elements connected in series or parallel.
When several parts are arranged in parallel, the overall rigidity of this system is determined by the simple sum of the coefficients of the individual components. As is easy to see, the rigidity of the system is greater than that of an individual part.
With a sequential arrangement, the formula is more complex: the reciprocal of the total stiffness is equal to the sum of the reciprocals of the rigidity of each component. In this version, the sum is less than the terms.
Using these dependencies, it is easy to determine the correct choice of elastic components for a particular case.
How to find the elongation of a spring?
This formula, or rather Hooke’s law, looks like this: F=|kx|, where k is the elasticity coefficient of the spring, x is the elongation of the spring or, as it is also called, the amount of deformation of the spring.
Interesting materials:
What happens to the internal energy of water when heated? What happens to water when it is heated and when cooled? What happens to water on the night of January 19? What caused the decrease in water flow into the Aral Sea? What does it mean to muddy the waters? What are water-insoluble substances? What is powder eau de toilette? What is an eau de toilette tester? What is water for grade 2? What is water for injection?
Concept of rigidity
Stiffness as a physical quantity characterizes the force that must be applied to a spring to achieve a certain degree of extension or compression.
The stiffness coefficient is calculated using Hooke's formula:
where $F$ is the force developed by the spring, $k$ is the stiffness coefficient depending on its characteristics (see above) and measured in newtons per meter, $x$ is the absolute increment in the distance by which the length of the spring has changed after the application of an external force . The minus sign on the right side of the formula indicates that the force generated by the spring acts in the opposite direction to the load.
The stiffness coefficient can be calculated experimentally by hanging weights with a known mass on a spring located vertically and attached to the upper end. In this case there is a dependence
$m cdot g — k cdot x = 0$,
where $m$ is mass, $g$ is gravitational acceleration. From here
Determination of the stiffness coefficient
The stiffness coefficient (it is also called the coefficient of elasticity or proportionality) is most often written with the letter k, but sometimes you can find the designation D or c. Numerically, the stiffness will be equal to the magnitude of the force that stretches the spring per unit length (in the case of SI - 1 meter). The formula for finding the elasticity coefficient is derived from a special case of Hooke’s law:
The greater the stiffness value, the greater will be the resistance of the body to its deformation. Hooke's coefficient also shows how resistant a body is to external loads. This parameter depends on geometric parameters (wire diameter, number of turns and winding diameter on the wire axis) and on the material from which it is made.
The SI unit of stiffness is N/m.
Hooke's law.
The deformation is called small if the change in the size of the body is much less than its original size. At small deformations, the dependence of the elastic force on the magnitude of the deformation turns out to be linear.
Hooke's law . The absolute value of the elastic force is directly proportional to the amount of deformation. In particular, for a spring compressed or stretched by an amount, the elastic force is given by the formula:
where is the spring stiffness coefficient.
The stiffness coefficient depends not only on the material of the spring, but also on its shape and size.
From formula (1) it follows that the graph of the elastic force versus (small) deformation is a straight line (Fig. 1):
| Rice. 1. Hooke's Law |
The stiffness coefficient is the angular coefficient in the equation of a straight line. Therefore the equality is true:
where is the angle of inclination of this straight line to the abscissa axis. This equality is convenient to use when experimentally finding the quantity .
Let us emphasize once again that Hooke’s law about the linear dependence of the elastic force on the magnitude of deformation is valid only for small deformations of the body. When the deformations cease to be small, this dependence ceases to be linear and takes on a more complex form. Accordingly, the straight line in Fig. 1 is only a small initial section of a curvilinear graph describing the dependence on for all values of deformation.
How did the first version of the formula appear?
The formula for calculating the spring stiffness, which is called Hooke's law, was established experimentally. During experiments with loads of different masses suspended on an elastic element, the magnitude of its elongation was measured. So it turned out that the same test part under different loads undergoes different deformations. Moreover, hanging a certain number of weights of equal mass showed that each added/removed weight increases/decreases the length of the elastic element by the same amount.
As a result of these experiments, the following formula appeared: kx=mg, where k is a certain constant coefficient for a given spring, x is the change in the length of the spring, m is its mass, and g is the acceleration of gravity (approximate value is 9.8 m/s²) .
This is how the property of rigidity was discovered, which, like the formula for determining the elasticity coefficient, finds the widest application in any industry.
Deformation.
Elastic forces arise when bodies are deformed. Deformation is a change in the shape and size of the body. Deformations include tension, compression, torsion, shear and bending. Deformations can be elastic or plastic. Elastic deformation completely disappears after the action of the external forces causing it ceases, so that the body completely restores its shape and size. Plastic deformation persists (perhaps partially) after the external load is removed, and the body no longer returns to its previous size and shape.
Particles of the body (molecules or atoms) interact with each other by forces of attraction and repulsion that are of electromagnetic origin (these are forces acting between the nuclei and electrons of neighboring atoms). The interaction forces depend on the distances between particles. If there is no deformation, then the attractive forces are compensated by the repulsive forces. During deformation, the distances between particles change and the balance of interaction forces is disrupted.
For example, when a rod is stretched, the distances between its particles increase and attractive forces begin to dominate. On the contrary, when the rod is compressed, the distances between the particles decrease and repulsive forces begin to dominate. In any case, a force arises that is directed in the direction opposite to the deformation and tends to restore the original configuration of the body.
The elastic force is a force that arises during elastic deformation of a body and is directed in the direction opposite to the displacement of body particles during the deformation process. Elastic force:
1. acts between adjacent layers of a deformed body and is applied to each layer; 2. acts from the side of the deformed body on the body in contact with it, causing the deformation, and is applied at the point of contact of these bodies perpendicular to their surfaces (a typical example is the support reaction force).
The forces arising during plastic deformations are not elastic forces. These forces depend not on the magnitude of the deformation, but on the speed of its occurrence. The study of such forces goes far beyond the school curriculum.
In school physics, stretching of threads and cables, as well as stretching and compression of springs and rods are considered. In all these cases, elastic forces are directed along the axes of these bodies.