История появления многошпиндельного вертикального токарного полуавтомата
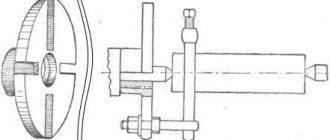
Появлению многошпиндельных вертикальных токарных полуавтоматов предшествовала довольно длинная история. Гражданская война в США (1861-1865), породившая нехватку рабочей силы, требовала автоматизации производства Тогда и появился первый станок-автомат. К. Випиль еще в 1842 г. создал автоматический станок для обработки древесины, а в 1876 г. Хр. Спенсер автоматизировал токарный станок. Его однофамилец английский инженер С. Спенсер еще в 1860 г. построил свой автоматический токарный станок. Многошпиндельный станок (на котором изделие автоматически проходит через ряд позиций и на каждой из них подвергается одной или нескольким операциям обработки) появился в 1895 г. Накануне Первой мировой войны появились автоматизированные токарные станки, на которых заготовка проходит последовательно через шесть — восемь позиций, причем на каждой из них заготовка подвергается разным токарным операциям. Этот станок известен как «Мультоматик» Булларда (рис. 1) .
Рис. 1. «Мультоматик» Булларда
Классификация многошпиндельных токарных автоматов и полуавтоматов
Многошпиндельные токарные автоматы и полуавтоматы широко применяют в серийном и массовом производстве. Их подразделяют:
- по виду заготовки — на прутковые и патронные;
- принципу работы — на станки параллельного и последовательного действия;
- расположению шпинделя — на горизонтальные и вертикальные
Токарные автоматы и полуавтоматы используются для обработки заготовок сложной формы в условиях крупносерийного и массового производства.
Конструктивным признаком автомата является наличие полного комплекта механизмов для выполнения рабочих и вспомогательных ходов, автоматизирующих цикл, а также системы управления, координирующей их работу.
Полуавтомат от автомата отличается тем, что в комплекте автоматизированных целевых механизмов отсутствует загрузочноразгрузочное устройство и эту операцию выполняют вручную или с помощью дополнительных средств механизации. Таким образом, для повторения цикла требуется вмешательство человека (для загрузки заготовок, съема изделий, ориентирования, зажима заготовок, включения цикла)
Наибольшее распространение получили многошпиндельные автоматы и полуавтоматы последовательного действия На таких станках заготовки с загрузочной позиции периодическим поворотом стола (вертикальная компоновка) или шпиндельного блока (горизонтальная компоновка) последовательно подводятся к рабочим позициям и одновременно обрабатываются на них инструментальными группами в соответствии с технологическим процессом. Многошпиндельные вертикальные токарные полуавтоматы (МВТП) применяют для токарной обработки литых и штампованных средних и крупных заготовок. Шпиндели станка разгружены от изгибающих нагрузок, вызываемых массой заготовки, станок занимает мало места. Современные полуавтоматы этого типа имеют 4-16 рабочих шпинделей. Первая позиция — загрузочная, на остальных позициях расположены рабочие механизмы, и каждую из этих позиций можно рассматривать как станок, связанный с другими общими приводом и управлением и единством базовых деталей.
Особенность МВТП (рис. 2) заключается в том, что работа шпинделей и суппортов в отдельных позициях независима в своей кинематической настройке По сравнению с горизонтальными полуавтоматами они имеют следующие преимущества:
- удобней, легче и безопасней устанавливать тяжелые заготовки на горизонтальную плоскость патронов;
- занимают меньшую производственную площадь;
- все позиции, в которых находится деталь во время обработки, расположены в местах легкодоступных и удобных для настройки и наблюдения за процессом обработки;
- поскольку частота вращения шпинделя и подача суппорта в каждой позиции настраиваются независимо от других позиций, обработку с оптимальными режимами резания можно производить во всех позициях;
- для каждой позиции можно устанавливать любой из имеющихся суппортов, что расширяет технологические возможности станка.
Рис. 2. Современный вертикальный восьмишпиндельный токарный полуавтомат
Токарный автомат продольного точения
Автомат продольного точения — это один из видов специализированного токарного оборудования, входящий в классификационную группу «Токарные автоматы и полуавтоматы». Такое оборудование применяют при массовом производстве высокоточных малогабаритных деталей типа тел вращения. В каталогах производственного оборудования (особенно зарубежных) для этих автоматов используется другое название — «токарный станок швейцарского типа» (swiss-type lathe).
Это связано с тем, что токарные станки с продольным перемещением шпиндельной бабки и неподвижным суппортом были созданы в конце девятнадцатого века швейцарскими часовщиками. За сто с лишним лет основная компоновка и принцип работы таких станков совсем не изменились, но при этом они получили множеством дополнительных возможностей . В настоящее время одним из самых распространенных видов такого оборудования является токарный автомат продольного точения с ЧПУ, в состав которого помимо традиционных неподвижных суппортов обычно входят противошпиндель и несколько позиционируемых блоков приводного и режущего инструмента.
Устройство вертикального многошпиндельного полуавтомата последовательного действия
Принципиальная схема шестишпиндельного полуавтомата последовательного действия (рис. 3) включает основание 1 с установленной неподвижной шестигранной колонной 5, вокруг которой периодически поворачивается стол 2 с шестью шпинделями 3. Пять суппортов 4 обслуживают одновременно пять шпинделей. Заготовка устанавливается в загрузочной позиции, не имеющей суппорта. После поворота стола на 60° шпиндель начинает вращаться и деталь обрабатывается в позиции I. По окончании первой операции стол снова поворачивается, перемещая заготовку в позицию II, и т. д. Таким образом, в каждой позиции осуществляется определенная операция и по окончании обработки в загрузочную позицию приходит готовая деталь Привод станка состоит из электродвигателя 7 и редуктора 6. В целом станок компонуется из трех блоков: верхнего, среднего и нижнего. В верхнем блоке расположены электродвигатель 7 с редуктором 6 и пять коробок скоростей 8 и подач, командоаппараты 9 и др.
Рис. 3. Принципиальная схема шестишпиндельного полуавтомата последовательного действия
В среднем блоке на пустотелой колонне, вначале имеющей призматическую форму, потом цилиндрическую, переходящую в конус, смонтированы узлы, определяющие точность станка и его жесткость: направляющие, суппорты 4, базируется поворотный шпиндельный стол 2. Через полость колонны проходят валы 10 привода позиций, а также тяга тормоза и синхронизаторов 11. На нижнем чашеобразном блоке-основании установлены синхронизаторы 13, тормоз, редуктор, механизм поворота стола и фиксатор 14, насос СОЖ, электрошкаф 12, резервуар для масла и другие механизмы. На закаленной конической поверхности колонны центрируется поворотный шпиндельный стол.
Командоаппараты рабочих позиций служат для контроля исходного положения суппорта, управления его быстрым подводом и переключением на рабочую подачу и ее изменением во время обработки, быстрого отвода и контроля перегрузки суппорта.
Частоты вращения шпинделей на разных позициях могут быть разными, и после поворота шпиндельного стола на новую позицию шпиндель должен получить частоту вращения, установленную для данной позиции. Для безударного соединения зубчатых колес, вращающих шпиндель, с главным приводом служит синхронизатор Тормоз останавливает продолжающий вращаться по инерции шпиндель после его поворота на загрузочную позицию, потом освобождает его, позволяя вращать при установке заготовки вручную Шпиндельный стол несет на себе шпиндели с патронами или приспособлениями для установки и закрепления обрабатываемых деталей и служит для транспортирования шпинделей из одной позиции в другую. Упорный подшипник шпиндельного стола влияет на точность обработки, надежность работы стола и сохранение положения шпинделей под действием сил резания.
Механизм поворота шпиндельного стола мальтийского типа и цанговый фиксатор обеспечивают плавную индексацию и безударное сопряжение стопора и стола Командоаппарат индексации стола служит для наладки угла поворота стола при одинарной или двойной индексации, определения его положения, при котором допустимы загрузка и обработка, настройки командных точек окончания поворота и включения шпинделей и фиксатора, а также для контроля положения фиксатора.
Суппорты стандартной комплектации позволяют выполнять наиболее распространенные виды обработки. Все основные пять типов суппортов монтируются на направляющих колонны и обеспечивают:
- вертикальный — вертикальное перемещение инструмента, имеет наиболее простую и жесткую конструкцию;
- универсальный — продольное вертикальное, а потом горизонтальное или угловое перемещение;
- параллельного действия — обработку детали двумя группами инструмента, одна из которых имеет вертикальное перемещение, а другая — последовательно вертикальное и горизонтальное. Этот суппорт наименее жесткий и применяется при недостатке рабочих позиций;
- суппорт с приводом сверлильной головки — обработку нецентральных отверстий планетарными головками без остановки шпинделя;
- суппорт с расточной головкой — чистовую обработку центральных отверстий диаметром от 20 до 100 мм.
Токарные многошпиндельные полуавтоматы широко распространены в крупносерийном и массовом производстве, потому что обладают широкими технологическими возможностями при изготовлении разнообразных деталей и обеспечивают высокую степень концентрации обработки. Применение таких станков способствует повышению производительности труда, сокращению станкоемкости, уменьшению производственных площадей, упрощению транспортных связей.
Вертикальные многошпиндельные полуавтоматы служат для обработки в патроне или приспособлении, реже в центрах, деталей сравнительно больших размеров. Большое число рабочих позиций (обычно 6-8) позволяет использовать их в разных сочетаниях. Детали сложной формы проходят обработку на всех позициях станка, перемещаясь в очередном цикле на следующую позицию (одинарная индексация) Для простых деталей, которые можно обработать на малом числе позиций, применяют более производительную параллельно-последовательную обработку Существует несколько вариантов: наиболее часто станок используется как два параллельно работающих станка, поворачивая в каждом цикле стол на две позиции (двойная индексация). Можно обрабатывать две детали с одной стороны или одну, но с двух сторон, можно обрабатывать две разные детали.
Станки выпускаются в силовом и скоростном исполнениях.
Настройка режимов резания — частоты вращения шпинделя и скорости подачи суппорта — выполняется посредством установки сменных зубчатых колес и выполнения соответствующих переключений на коробках подач. Координаты изменения скорости и направления перемещения суппорта с точностью 0,3. . . 0,5 мм настраиваются командоаппаратами позиций с помощью кулачков. Дополнительно применяют жесткие упоры в конце хода. Размер изделия окончательно настраивается регулировкой инструмента.
Специализированные станки-полуавтоматы и автоматы
Для массового и серийного производства однотипных деталей сложной формы целесообразно применять специализированные полуавтоматы и автоматы, обладающие высокой производительностью. Например, токарные автоматы и полуавтоматы используют при массовом производстве деталей сложной формы из прутка и штучных заготовок. Обработку деталей на этих станках производят несколькими инструментами, которые устанавливают в сверлильных, резьбонарезных и других приспособлениях. Основной недостаток этих автоматов — длительная наладка оборудования при переходе на новый тип детали, при этом требуется переделка основных узлов.
Классический пример специального станочного оборудования — агрегатный станок-полуавтомат и автомат, в которых применение многоинструментальной и многопозиционной обработки позволяет повысить производительность в десятки раз по сравнению с универсальным оборудованием, в том числе и с ЧПУ.
Чтобы сократить затраты, специальные автоматы не проектируют каждый раз заново, а компонуют из готовых функциональных элементов широкого назначения.
В многопозиционных агрегатных станках-полуавтоматах нормализованы силовые головки и силовые столы, направляющие, поворотные столы со станинами и приводом периодического поворота, боковые станины и вертикальные стойки, блоки аппаратуры управления и приводы. Проектируют лишь шпиндельные коробки, приспособления для закрепления деталей. Остальные части подбирают по каталогам, подобно тому как подбирают подшипники, двигатели, крепеж и т. д.
Схема компоновки многошпиндельных станков-полуавтоматов приведена на рис. 114.
Рассмотрим подробнее схему работы шестишпиндельного автомата последовательного действия (рис. 115, а
). В автомате шесть шпинделей
6,
расположенных через равные расстояния по дуге окружности в одном шпиндельном блоке
1
. Вокруг блока расположено шесть поперечных суппортов
2,
а на центральной гильзе
4
перемещается общий для всех шпинделей продольный суппорт
5.
Он выполнен в виде шестигранника, на каждой грани которого устанавливают державки с инструментом. Поперечные суппорты получают подачу от индивидуальных кулачков, а продольный суппорт — от одного общего кулачка. В случае необходимости на продольном суппорте могут быть установлены скользящие державки с режущим инструментом, получающие подачу от индивидуальных кулачков, а рядом — инструментальные шпиндели с независимым приводом вращения. Шпиндели автомата получают вращение от приводного вала
3
через общее центральное зубчатое колесо
7
и поэтому имеют одинаковое число оборотов.
Рис. 114. Схема компоновки многопозиционных станков-полуавтоматов из нормализованных элементов
Рис. 115. Схема шестишпиндельного автомата мод. 1А225-6:
а
— схема обработки заготовки;
б
— компоновка автомата
Многошпиндельные прутковые автоматы мод. 1А225-6 и МР-32 предназначены для сверления, зенкерования, нарезания резьбы, накатывания и отрезки деталей из пруткового материала круглого и многогранного сечения. Высокая жесткость конструкции автомата позволяет обрабатывать на них заготовки на повышенных режимах резания инструментом с твердосплавными пластинками.
Автомат (рис. 115, б
) состоит из станины
16,
на которой закреплены все агрегаты. Внутри станины установлены электродвигатели главного привода, насос системы охлаждения и шнековый транспортер для удаления стружки, коробка передач
11,
корпус
5
шпиндельного блока, поперечный
6
и продольный
8
суппорты, привод продольного суппорта и приспособления, рукоятка включения автоматического цикла
12.
В орган управления входят пульт управления 14,
квадрат
15
для выключения и включения транспортера, квадрат
13
для переключения скоростей, циклоуказатель
9
на корпусе
10.
Заготовки вставляют в направляющие трубы
2,
которые крепят в установленном на стойке
17
заднем диске
1
и среднем диске
3.
Обработку заготовки в автомате ведут автоматически в шести шпинделях, помещенных в одном, периодически поворачивающемся шпиндельном блоке, расположенном в корпусе 5
с ребрами
4.
Режущие инструменты устанавливают в нескольких поперечных суппортах
6,
расположенных по окружности шпиндельного блока и на общем для всех рабочих шпинделей продольном суппорте
8.
Автоматом управляет распределительный вал, расположенный в траверсе 7.
Кнопочное управление расположено на пульте управления
14.
Автоматический цикл работы станка включается рукояткой
12,
а скорость вращения шпинделей изменяется квадратом
13.
Уборку стружки производит шнековый транспортер, который включается квадратом
15.
В автомате есть механизм автоматической остановки движения прутка, счетчик обработанных деталей, шнековый транспортер для удаления стружки, что обеспечивает безаварийную работу и облегчает обслуживание автомата. Он снабжен также наладочным приводом распределительного вала быстрой наладки.
Большое применение нашли агрегатные станки из нормализованных узлов. В агрегатных станках применяют различные схемы обработки деталей.
На рис. 116 показаны схемы расположения агрегатных головок для случая, когда деталь неподвижна, а ее обработка происходит за одну-две установки комбинированным режущим инструментом. Применяют двустороннее угловое (а
)расположение силовых головок, трехстороннее (
б
),четырехстороннее (
в
) и круговое (
г
). При трех первых вариантах заготовка может подаваться в той же плоскости силовых головок, а при круговом расположении заготовка может подаваться сверху кран-балкой или из наклонного магазина.
Рис. 116. Схема расположения агрегатных силовых головок:
а
— угловое;
б
— трехстороннее;
в
— четырехстороннее;
г
— круговое
Если при обработке заготовка занимает ряд последовательных положений, то применяют рядное (рис. 117) расположение силовых головок. Бывают агрегатные станки с односторонним (а
) и двусторонним (
б
) расположением силовых головок, укомплектованными транспортной системой с поворотными столами.
Схема обработки детали типа корпусной показана на рис. 118. Деталь неподвижна и обрабатывается за один установ.
Рис. 117. Расположение агрегатных головок:
а
— одностороннее;
б
— двустороннее
Рис. 118. Обработка деталей типа корпусных
Рассмотрим применение этой схемы на примере типовой компоновки специализированного агрегатного станка для обработки кронштейнов (рис. 119). Все узлы и элементы агрегата можно разделить на: группу опорных элементов — станина 1
; кронштейны горизонтальные
13, 14, 15, 16
и вертикальные
5, 7
; стол делительный поворотный
2,
группу элементов передач — силовые головки
4, 6, 8
типа ГС-5; силовые головки
10, 13′
типа ГС-7; редукторы
11
,
14′, 9
и редуктор привода стола; группу элементов управления — упоры и пульт
3.
Обычно в компоновку агрегата входит загрузочное и разгрузочное устройства, транспортер для стружки и система охлаждения.
Рис. 119. Типовая схема компоновки агрегатного станка для обработки кронштейна
Обрабатываемую деталь-кронштейн устанавливают на загрузочную позицию 12
делительного поворотного стола
2
и крепят в приспособлении. Цикл работы станка автоматический. Делительный стол поворачивается и заготовка устанавливается на рабочую позицию
I
. На этой позиции происходит сверление отверстий на одной плоскости, далее деталь переходит в рабочую позицию
II,
где происходит зенкование просверленных отверстий. При поступлении детали на позицию
III
сверлится вторая группа отверстий, а на позиции
IV
происходит сверление отверстий на плоскости, перпендикулярной первой. На
V
позиции происходит зенкование просверленных на позиции
IV
отверстий.
Как правило, производительность агрегатных станков высокая, а их исполнение позволяет обрабатывать детали сложной формы типа корпусных. На агрегатных станках устанавливают силовые многошпиндельные головки. Станок по компоновке, схожий со станком на рис. 119, — агрегатный пятисторонний 20-шпиндельный горизонтально сверлильный станок. Этот агрегат выполняет операции сверления, зенкования, подреза торцов и развертывания отверстий в тягах трапеций и наконечниках рулевой трапеции.
В компоновку стола входит семипозиционный поворотный делительный стол, на котором установлены семь приспособлений для зажима четырех деталей. Пять силовых горизонтальных головок, установленных на станине, обеспечивают обработку деталей. Разгружают детали механизмом, зажим деталей гидравлический, удаление стружки — транспортером с подъемом на высоту 1000 мм. При обработке детали подается охлаждающая эмульсия, цикл работы станка автоматический.
В особую группу устройств выделены роторные автоматы. Эта группа машин совершает непрерывное круговое движение совместно с изделием и выполняет все технологические операции в процессе движения. Основное свойство машин состоит в том, что их производительность не зависит от продолжительности технологических операций. Изделия транспортируют от одной рабочей машины к другой вращающиеся роторы. На рис. 120 приведена схема роторной машины.
Рис. 120. Схема роторного автомата
Технологический ротор состоит из транспортного питающего ротора 1,
транспортера съемного ротора
13,
обрабатывающего (рабочего) ротора
14
с валом
3,
ползунов
4, 11,
зубчатых передаточных колес
5, 6, 7,
блоков
10.
Загрузочный транспортный ротор состоит из бункеров, лотков, механизмов ориентации. Загрузочный ротор обеспечивает выдачу предметов обработки на позицию обрабатывающего ротора. Заготовка в зоне 11
из загрузочного транспортера ротора
1
подается в рабочий ротор
14,
сидящий на валу
3.
В зоне
I
при вращении рабочего ротора заготовка обрабатывается, а в зоне
IV
снимается транспортным съемным ротором
13
при помощи несущих органов
2
и
9.
Несущие органы
2
и
9
приводятся во вращение зубчатыми колесами
5, 6, 7.
В зоне
III
происходит смена инструментов, которые крепятся на блоках
10.
При вращении ротора блоки перемещаются ползунами
4, 11
под действием неподвижных копиров
8
и
12.
Схема ротора холодноштамповочной линии (рис. 121) состоит из прессового ротора 1
, транспортного ротора
2,
электрощупа
3
и ротора контроля
4.
Рис. 121. Схема роторного автомата для холодной штамповки
Автооператоры
Автооператоры — это механизмы или совокупность механизмов, которые обеспечивают подачу заготовки в рабочую зону станка и съем обработанной детали.
Автооператор включает следующие устройства: отсекатель, питатель, механизм захвата, заталкиватель, выталкиватель или съемник, отводящее и блокирующее устройства.
Ранее рассматривались некоторые типы этих целевых механизмов. Интерес представляет автооператор, который обеспечивает: перемещение детали от магазина на станок по сложной траектории; поворот детали на 180° для обработки последовательно сначала одной, а затем другой поверхности.
Автооператор может быть приставным самостоятельно действующим механизмом (рис. 122). Его крепят к станине винтами, проходящими через отверстия в плите 6.
Рычаг
2
с вакуумным (пневматическим) захватом
1
может качаться в вертикальной плоскости относительно оси
3,
расположенной на кронштейне
4,
который поворачивается на 360°. Пневмопривод
5
передает движение рычагу
2
и кронштейну
4
от распределительного вала, командоаппарата, датчика и реле времени. На рис. 123, а показаны схемы работы автооператора для перемещения плоских, а на рис. 123,
б
— цилиндрических деталей. В некоторых автооператорах используют также механический (пинцет, несколько пружинящих проволочек) или электромагнитный захват. В пневмозахватах (воздушных) выталкивание происходит под действием собственного веса детали или подачей воздуха под давлением после отключения вакуума, а также механическим путем.
Изделия сложной формы, требующие сложной траектории перемещения при удалении, выносят с помощью механических рук.
Рис. 122. Универсальная механическая рука-автооператор
Рис. 123. Схемы действия автооператоров
Пример автооператора с кантователем показан на рис. 124. Цикл работы автооператора происходит следующим образом. В исходном положении механическая рука 3
отведена влево и ее захваты расположены соосно шпинделям позиций загрузки
I
станка. После поворота шпиндельного блока гидроцилиндр
9
осевого перемещения механической руки
3
перемещает ее в сторону шпинделей. Верхний захват
7
зажимает готовую деталь, а нижний — полуфабрикат. Далее механическая рука
3
перемещается вправо и поворачивается от гидроцилиндра
9,
останавливаясь в позиции
III
. После поворота механическая рука перемещается к отводному лотку
4
и кантователю. Обработанную полностью деталь подают в отводной лоток, а полуфабрикат в кантователь
5.
Затем механическая рука отходит назад и поворачивается в позицию
II
. В это время подаватель
2
вместе с заготовкой перемещается в позицию загрузки, а кантователь переворачивает полуфабрикат на 180°. Механическая рука перемещается в сторону кантователя, и ее верхний захват забирает заготовку, а нижний — полуфабрикат. Затем механическая рука опять перемещается назад, поворачивается в позицию
I
, подает заготовку и полуфабрикат в патроны шпинделей и отходит назад в исходное положение. Подаватель
2
заготовок перемещается вверх к лотку
1
. Срабатывает отсекатель
6,
пропуская из лотка в подаватель новую заготовку. Далее цикл работы повторяется.
Рис. 124. Автооператор с кантователем к многошпиндельному автомату
В последние годы распространение получили многочисленные конструкции автооператоров с большим числом степеней перемещений — манипуляторы.
Кинематическая схема вертикального многошпиндельного полуавтомата последовательного действия
Кинематическая схема одной из семи секций привода главного движения и подачи (остальные шесть секций аналогичны), а также привод и механизм поворота стола со шпинделями показана на рис 3 33
При главном движении рабочие шпиндели VIII получают высокие частоты вращения от электродвигателя M1 (N = 10 кВт; n = 1460 мин-1) через передачу 16-39 • 39-118 • 118-31, а низкие — через передачу 16-39 • 22-39 • 22-39 • 39-118 • 118-31 и далее с вала V через сменные колеса a-b, цилиндрические пары колес 35-40 и 37-50 (при скоростном исполнении — через пару колес 37-37) . Зубчатое колесо с z = 35 во время поворота стола выводится из зацепления с колесом с z = 40, а после поворота входит в зацепление с таким же зубчатым колесом другого шпинделя, пришедшего в эту позицию После каждой индексации стола шпиндели приобретают частоту вращения той позиции, в которую они перешли. Частота вращения шпинделей в каждой позиции регулируется своим звеном настройки a — b Синхронизаторы обеспечивают плавное безударное начало вращения шпинделю в каждой позиции Каждый шпиндель, начиная с вала V, имеет индивидуальную, но одинаковую с цепями других шпинделей цепь привода. Этих цепей столько, сколько рабочих позиций (у станка 1К285 их семь) . Тормоз, останавливающий шпиндель загрузочной позиции, имеет механизм, который включается от привода, общего с синхронизаторами, сцепляется с коническими чашками предшпиндельных валов и по конструкции повторяет синхронизатор, но не имеет вращающихся элементов.
Рис. 4. Кинематическая схема вертикального многошпиндельного токарного полуавтомата модели 1К285
Цепи рабочих подач и быстрых перемещений суппорта сосредоточены в коробках подач При помощи встроенных в них электромагнитных фрикционных муфт осуществляется переключение скорости подачи с большой на малую или наоборот (в соотношении 2,63 раза).
Рабочая подача суппортов осуществляется от вала VI через червячную передачу 1-32, гитару сменных зубчатых колес c-d · e—f и далее через зубчатые колеса 35—62 (при включении электромагнитной муфты ЭМ1) или через колеса 58-39 (при включении электромагнитной муфты ЭМ2) на вал XIII. С этого вала через конические зубчатые колеса 27-38 вращение передается на гайку ходового винта суппорта (P = 12 мм). Переключением муфт ЭМ1 и ЭМ2 можно устанавливать автоматически в процессе обработки заготовки две рабочие подачи суппорта (малую и большую).
Ускоренная подача суппорта осуществляется от вала V через конические зубчатые колеса 20-20 и пару цилиндрических колес 70-40 на вал X. Дальше при ускоренном подводе суппорта к обрабатываемой заготовке (включена электромагнитная муфта ЭМ3) вращение передается через передачу 57-39 • 38-59 • 27-38 на гайку ходового винта суппорта. При ускоренном отводе суппорта (включена электромагнитная муфта ЭМ4) вращение на гайку ходового винта передается через зубчатые колеса 58-31 • 31-38 • 38-59 • 27-38. В цепи ускоренных подач возможно реверсирование направления движения за счет включения с помощью двух муфт различных кинематических цепей.
Электромагнитные муфты быстрых ходов суппорта сблокированы с такими же муфтами рабочих подач. Включаются муфты с помощью конечных выключателей, установленных в командоаппарате.
Вращение вала командоаппарата осуществляется от вала XIII через винтовую зубчатую передачу 18-13 и червячную пару 1-66. Командоаппарат управляет рабочими и вспомогательными ходами суппорта в автоматическом и наладочном циклах. В его корпусе, кроме конечных выключателей, размещены кулачковый вал и рычаги. Конечные выключатели не имеют пружин, отчего поданная на них команда запоминается до следующего нажатия.
После окончания рабочих операций во всех позициях и отвода всех суппортов в верхнее положение подается команда на отключение привода электродвигателя М1 и торможение всей системы с последующим поворотом стола.
Поворот стола осуществляется от электродвигателя М2 (N = = 2 кВт; n = 1300 мин-1) через червячную передачу 1-25, зубчатые колеса 14-105 и мальтийский крест. На ступице зубчатого колеса с z = 105 установлена планка с двумя роликами. При повороте колеса с планкой ролики входят в паз на нижней части стола, поворачивая его. При повороте планки на 180° стол поворачивается на одну позицию (1/8 часть оборота), а при повороте на 360° — сразу на две позиции (1/4 часть оборота) . После поворота стола, но до включения вращения шпинделей, происходит его фиксация.
Управление механизмом поворота и фиксации стола осуществляется путем воздействия двух кулачков 2 на конечные выключатели командоаппарата индексации стола. Кулачки установлены на валу XXII, который через передачу 105-15 • 4-28 получает периодическое вращение.
По окончании поворота стола выключается электродвигатель М2 и включается пусковая муфта двигателя главного привода М1.
Станок оборудован автоматизированным гидравлическим устройством для зажима детали, имеет механизированное загрузочное устройство и систему уборки стружки Станки в шестишпиндельном исполнении выпускаются с диаметрами патронов 630 и 800 мм, в восьмишпиндельном исполнении — 250 и 400 мм.
Кроме уже названных суппортов пяти видов, со станком по заказу могут поставляться специальные суппорты, которые являются модификацией универсального и позволяют расширить технологические возможности станка — выполнять:
- обработку продольных фасонных поверхностей по копиру;
- обработку конусов по конусной линейке;
- обработку цилиндрических поверхностей с отскоком в конце рабочего хода;
- обработку торцовой поверхности одновременно с конической;
- растачивание сферических поверхностей
Среди разнообразных устройств, которыми оснащается полуавтомат, наиболее сложна кинематическая цепь привода многошпиндельной сверлильной головки При применении головки к коробке подач соответствующей позиции присоединяется дополнительный редуктор.
Полуавтоматы параллельного действия
По аналогичной схеме сконструированы и полуавтоматы параллельного действия, на всех шпинделях которых, в отличие от полуавтоматов последовательного действия, производятся одновременно одинаковые операции и за один цикл работы завершается обработка стольких заготовок, сколько шпинделей имеет станок У такого станка на основании 5 (нижний блок) установлена неподвижная вертикальная колонна 4, вокруг которой непрерывно вращается стол со шпинделями и шестигранная гильза с шестью суппортами 2, представляющие собой единое целое — карусель 1 (рис. 5).
Рис. 5. Схема работы вертикального многошпиндельного полуавтомата: 1 — карусель; 2 — суппорт; 3 — барабан; 4 — колонна; 5 — основание.
При повороте гильзы суппорты перемещаются по ее вертикальным направляющим от неподвижного барабана 3 (верхний блок), с которым они связаны тягами. У полуавтомата каждый шпиндель имеет свой суппорт, с которого ведется обработка детали во время вращения карусели. За один полный оборот карусели на каждом шпинделе, проходящем загрузочную зону, заканчивается обработка детали. В этой зоне сначала автоматически выключается вращение шпинделя и освобождается от зажима деталь, а соответствующий суппорт быстро отходит вверх, снимается готовая деталь и устанавливается новая заготовка Затем она автоматически зажимается, шпинделю сообщается вращение, а суппорт быстро подводится к заготовке. Современные полуавтоматы этого типа имеют от четырех и более рабочих шпинделей.
Многошпиндельные токарные горизонтальные автоматы и полуавтоматы
Станок-автомат, на котором несколько инструментов подводятся к изделию в определенной последовательности автоматически, а токарь только подает прутковые заготовки, был создан в годы.
Гражданской войны в США (1861-1865) и внедрен в производство несколько лет спустя.
Первым многошпиндельным горизонтальным автоматом, освоенным в СССР на станкозаводе им. С. Орджоникидзе в Москве в 1936 г. , был автомат модели 123. В дальнейшем освоены многошпиндельный вертикальный полуавтомат модели 23 на в Москве (1937) и многошпиндельный горизонтальный автомат модели 1261 на Киевском станкозаводе (1939). Первые станки этого типа имели вид, представленный на рис 6.
Классификация многошпиндельных токарных горизонтальных автоматов и полуавтоматов
Многошпиндельные токарные горизонтальные прутковые автоматы выпускаются для обработки прутковых заготовок или труб диаметром от 16 до 160 мм. Конструкция автоматов выполнена с учетом возможности встраивания их в автоматические линии Шести- и восьмишпиндельные автоматы, в отличие от четырехшпиндельных, можно настраивать для работы с двойной индексацией.
Для широкой унификации гамма многошпиндельных горизонтальных автоматов построена по следующей схеме:
- наибольшие размеры обрабатываемых прутков выбраны для каждого вида автоматов по геометрическому ряду со знаменателем 1,58;
- базовыми являются шестишпиндельные станки;
четырех- и восьмишпиндельные станки выпускаются на основе базовых моделей с незначительными изменениями, определяемыми другим количеством шпинделей;
— у восьмишпиндельных станков расстояние между шпинделями меньше, в результае чего обрабатываемый пруток в 1,26 раза тоньше, чем у шестишпиндельных, а у четырехшпиндельных — наоборот, в 1,26 раза толще.
Рис. 6. Четырехшпиндельный автомат Schutte выпуска 1915 г. (Германия)
Многошпиндельные токарные горизонтальные прутковые автоматы выпускаются в прутковом и патронном исполнениях для работы в условиях крупносерийного и массового производств В патронном варианте станок оснащается по заказу автооператором для автоматизации загрузки заготовки и выгрузки обработанных деталей. Автомат в прутковом исполнении комплектуется устройством для поддержания вращающихся прутков, передние концы которых находятся в шпиндельном блоке и закреплены в шпинделях с помощью цанговых патронов. Основанные на той же элементной базе полуавтоматы обрабатывают штучные заготовки диаметром до 500 мм.
Классификация токарных автоматов
Токарные автоматы и полуавтоматы — это отдельная группа токарного оборудования, предназначенная для высокоскоростного массового выпуска малоразмерных деталей цилиндрической формы. Одной из их характерных особенностей является то, что в качестве заготовки на многих видах этого оборудования используется калиброванные пруток или проволока, подаваемая в зону обработки через полый шпиндель. Основные виды материалов, обрабатываемых на этих станках — это обычные и легированные сорта сталей, сплавы алюминия, латунь и другие сплавы меди.
Классификация токарных автоматов и полуавтоматов производится по следующим признакам:
- область применения (специализированные, универсальные);
- компоновка (вертикальные, горизонтальные;
- количество шпинделей;
- принцип подачи и фиксации заготовки;
- тип управления (механическое, электромеханическое, электронное с цифровым приводом);
- способ обработки;
Внутри классификационных групп используют дополнительные признаки, связанные с технологическими особенностями, назначением и видами обработки. Поэтому одношпиндельные токарные полуавтоматы, простейшие кулачковые токарные автоматы и обрабатывающие центры с продольным точением имеют идентичные названия, которые отличаются лишь указанием на вид управления и дополнительное оборудование. К примеру, полное название одной из групп современных автоматов продольного точения согласно этой классификации может звучать так: «универсальные горизонтальные одношпиндельные прутковые токарные автоматы продольного точения с ЧПУ, противошпинделем и револьверной головкой».
Дополнительный шпиндель станка продольного точения относят к дополнительному оборудованию, поэтому с учетом наличия револьверной головки его также можно назвать «одношпиндельный токарно-револьверный автомат продольного точения».
А токарный многошпиндельный автомат — это станок со шпиндельным блоком, состоящим из нескольких параллельных шпинделей, который смонтирован в передней бабке. Общее количество шпинделей в таком оборудовании — от двух до шести. Двухшпиндельные станки встречаются нечасто, а наибольшее распространение получил шестишпиндельный токарный автомат.
В таком токарном станке количество расположенных по кругу неподвижных суппортов с резцами соответствует числу одновременно вращающихся шпинделей. При повороте блока каждый шпиндель с зажатой в нем заготовкой перемещается в следующую позицию к очередному суппорту. На каждом суппорте установлены разные резцы, выполняющие точение определенной поверхности заготовки. Таким образом, за шесть фиксированных позиций поворота шпиндельного блока каждая из шести деталей подвергается обработке разными резцами шести суппортов.
Устройство горизонтального многошпиндельного токарного автомата
Основные узлы автомата — это станина 3 (рис. 7), на которой слева смонтирован корпус шпиндельного блока 4, а справа — корпус коробки подач 8. В корпусе шпиндельного блока размещены сам шпиндельный блок, механизм фиксации шпиндельного блока, зажима и подачи прутка, а также механизм упора (в станках пруткового исполнения) .
Рис. 7. Общий вид шестишпиндельного горизонтального токарного автомата: 1 — поддерживающее устройство; 2 — лоток выгрузки стружки; 3 — основание; 4 — корпус шпиндельного блока; 5 — поперечный суппорт; 6 — продольный суппорт; 7 — траверса; 8 — корпус механизма подач; 9 — электрошкаф.
В коробке подач смонтированы приводы вращения рабочих шпинделей и распределительного вала, механизмы резьбонарезания, быстрого сверления и развертывания, а также приводные втулки Сверху на обоих корпусах закреплена траверса 7, внутри которой размещен распределительный вал с барабанами и другими устройствами. На торцовой поверхности корпуса шпиндельного блока, обращенной внутрь автомата, и на траверсе располагаются поперечные суппорты 5. На трубе, закрепленной в корпусе коробки подач и в центре шпиндельного блока, смонтирован продольный суппорт 6 в виде многогранной призмы, на каждой грани которой устанавливаются инструмент и оснастка для обслуживания шпинделей На гранях продольного суппорта, обслуживающих пятую и шестую позиции, могут быть установлены подвижные стойки для инструментальных шпинделей, имеющих перемещение, независимое от перемещения главного продольного суппорта. Инструментальные шпиндели используют для резьбонарезания и быстрого сверления.
Станина является основанием автомата. Для повышения точности работы станка его корпусные узлы — станина, шпиндельный блок, коробка передач, траверса — соединены между собой и образуют жесткую раму (портал) В углублении средней части станины, где собирается стружка, и лотке 2 помещен шнековый транспортер для ее удаления.
В шпиндельном блоке размещены шпиндельный барабан, механизм фиксации и подъема барабана, механизм подачи и зажима прутка, приводы поперечных суппортов 2-, 3-, 4-, 6-й позиций. Равномерно по окружности диаметром 320 мм расположены шесть шпинделей Внутри каждого шпинделя — подающая и зажимная цанги. Механизм поворота и фиксации шпиндельного барабана начинает действовать после того, как в позиции 1 произойдут подача и зажим прутка.
Полуавтоматический станок, в отличие от автомата, обрабатывает штучные заготовки. Из-за этого он лишен поддерживающего устройства, а шпиндели станка не имеют механизма для подачи прутковой заготовки В автоматическом станке циклы обработки повторяются без участия рабочего, а в полуавтомате станочник должен после окончания цикла обработки и остановки шпинделя в загрузочной позиции извлечь из патрона обработанную заготовку, вставить необработанную и включить цикл обработки.
Многошпиндельные автоматы
Это оборудование подразделяется на два вида:
- параллельного действия;
- последовательного действия.
Распределительный вал является характерной деталью в токарных полуавтоматах и автоматах. На нём монтируются кулачки различной формы и конструкции (в зависимости от назначения). Они управляют всеми вспомогательными и рабочими движениями станков через систему механических и иных связей.
Наиболее употребительными исполнениями кулачков являются такие:
- барабанные. Они предназначены для управления вспомогательными и рабочими движениями станков. Он представляет собой цилиндр, который снабжён накладными кулачками или фасонными выфрезерованными канавками;
- дисковые. Нужны для приведения рабочих органов полуавтоматов и автоматов в движение — суппортов и револьверных головок.
Диски с торцевыми накладными кулачками используются только для включения движений вспомогательных (поворотов револьверной головки, зажима и движения прутка и других). Диски имеют раздельную шкалу. Чаще всего она разделяется на сотые доли оборотов. Эта шкала необходима для установки кулачков в нужном месте.
Многошпиндельные горизонтальные
Они нужны для обработки элементов из калиброванных прутков шестигранного, квадратного и круглого профилей, а также из труб при массовом и крупносерийном производстве различных отраслей машиностроения.
Основными технологическими операциями, которые выполняются на этом оборудовании, являются:
- фасонное обтачивание;
- накатывание резьбы;
- отрезка;
- нарезание резьбы;
- развёртывание;
- сверление;
- обтачивание.
Все нужные движения в оборудовании происходят автоматически при помощи кулачков, которые располагаются на распределительном валу. При одном его обороте происходит полный комплекс движений механизмов устройства, который необходим для производства одного обрабатываемого элемента. Такой комплекс определяет цикл обработки, а время цикла — это период, за который производится один оборот распределительного вала.
В многошпиндельном горизонтальном прутковом устройстве шпиндели располагаются в шпиндельном блоке по окружности. Поперечные суппорты находятся с торца шпиндельного блока, а продольный суппорт может перемещаться на центральной гильзе. Шпиндели устройства получают через зубчатые колёса вращение от центрального вала. После того как готовое изделие отрезается, шпиндельный блок разворачивается на угол, который соответствует количеству шпинделей.