Количество повторений каких-либо событий или их возникновения за одну единицу таймера называется частотой. Это физическая величина измеряется в герцах – Гц (Hz). Она обозначается буквами ν, f, F, и есть отношение количества повторяющихся событий к промежутку времени, в течение которого они произошли.
Вращение планет вокруг Солнца
При обращении предмета вокруг своего центра можно говорить о такой физической величине, как частота вращения, формула:
ν = N/t,
где:
- N – количество оборотов вокруг оси или по окружности,
- t – время, за которое они были совершены.
В системе СИ обозначается как – с-1 (s-1) и именуется как обороты в секунду (об/с). Применяют и другие единицы вращения. При описании вращения планет вокруг Солнца говорят об оборотах в часах. Юпитер делает одно вращение в 9,92 часа, тогда как Земля и Луна оборачиваются за 24 часа.
Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности.
Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.
Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено — это есть период T
. Путь, который преодолевает точка — это есть длина окружности.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Центростремительное ускорение
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.
Используя предыдущие формулы, можно вывести следующие соотношения
Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
Угол поворота и период обращения
Рассмотрим точку А на предмете, вращающимся вокруг своей оси. При обращении за какой-то период времени она изменит своё положение на линии окружности на определённый угол. Это угол поворота. Он измеряется в радианах, потому что за единицу берётся отрезок окружности, равный радиусу. Ещё одна величина измерения угла поворота – градус.
Частота тока
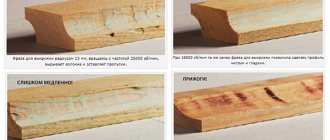
Когда в результате поворота точка А вернётся на своё прежнее место, значит, она совершила полный оборот. Если её движение повторится n-раз, то говорят о некотором количестве оборотов. Исходя из этого, можно рассматривать 1/2, 1/4 оборота и так далее. Яркий практический пример этому – путь, который проделывает фреза при фрезеровании детали, закреплённой в центре шпинделя станка.
Внимание! Угол поворота имеет направление. Оно отрицательное, когда вращение происходит по часовой стрелке и положительное при вращении против движения стрелки.
Если тело равномерно продвигается по окружности, можно говорить о постоянной угловой скорости при перемещении, ω = const.
В этом случае находят применения такие характеристики, как:
- период обращения – T, это время, необходимое для полного оборота точки при круговом движении;
- частота обращения – ν, это полное количество оборотов, которое совершает точка по круговой траектории за единичный временной интервал.
Интересно. По известным данным, Юпитер обращается вокруг Солнца за 12 лет. Когда Земля за это время делает вокруг Солнца почти 12 оборотов. Точное значение периода обращения круглого гиганта – 11,86 земных лет.
Связь со вторым законом Ньютона
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Движение по циклоиде*
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
Циклическая частота вращения (обращения)
Формула механической мощности — средняя и мгновенная мощность
Скалярная величина, измеряющая частоту вращательного движения, называется циклической частотой вращения. Это угловая частота, равная не самому вектору угловой скорости, а его модулю. Ещё её именуют радиальной или круговой частотой.
Циклическая частота вращения – это количество оборотов тела за 2*π секунды.
У электрических двигателей переменного тока это частота асинхронная. У них частота вращения ротора отстаёт от частоты вращения магнитного поля статора. Величина, определяющая это отставание, носит название скольжения – S. В процессе скольжения вал вращается, потому что в роторе возникает электроток. Скольжение допустимо до определённой величины, превышение которой приводит к перегреву асинхронной машины, и её обмотки могут сгореть.
Устройство этого типа двигателей отличается от устройства машин постоянного тока, где токопроводящая рамка вращается в поле постоянных магнитов. Большое количество рамок вместил в себя якорь, множество электромагнитов составили основу статора. В трёхфазных машинах переменного тока всё наоборот.
При работе асинхронного двигателя статор имеет вращающееся магнитное поле. Оно всегда зависит от параметров:
- частоты питающей сети;
- количества пар полюсов.
Скорость вращения ротора состоит в прямом соотношении со скоростью магнитного поля статора. Поле создаётся тремя обмотками, которые расположены под углом 120 градусов относительно друг друга.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
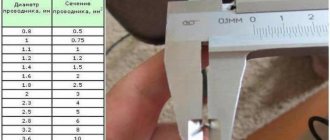
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Принцип действия
Если объяснять принцип работы частотного преобразователя, то можно сказать, что применение этого устройства позволяет эффективно и качественно управлять работой мощных асинхронных электродвигателей.
Оборудование представляет собой частотно-регулируемый привод (ЧРП), за счет которого улучшились технические характеристики машин и механизмов. Чтобы изменить число оборотов вала двигателя, необходимо отрегулировать амплитуду напряжения и частоты. Принцип работы преобразователя частоты основан на двух способах:
Скалярное управление — позволяет проводить регулировку согласно линейному закону, когда амплитуда и частота пропорционально зависят друг от друга. То есть изменение частоты влияет на амплитуду поступающего напряжения, которое действует на крутящий момент и коэффициент мощности механизма
Очень важно, чтобы момент нагрузки на валу электродвигателя оставался одинаковым, а отношение напряжения к выходной частоте оставалось неизменным. Векторная регулировка — позволяет удерживать постоянную нагрузку при любых изменениях частоты. Осуществляет более точное управление, и электропривод мягче реагирует на изменение выходной мощности
Следует учитывать, на момент вращения влияет величина тока статора, точнее, магнитное поле, которое он создает.
Промышленное напряжение поступает на выпрямитель, который сглаживает синусоиды, оставляя пульсации сигнала. Чтобы их ликвидировать и сгладить форму выходного напряжения, предусмотрены в конструкции конденсаторы с индуктивностью.
Чтобы обеспечить плавное торможение вращения, в конструкцию вмонтирован регулируемый транзистор с мощным сопротивлением. По такому принципу работает частотный преобразователь для электродвигателя.
Разновидности устройств
В зависимости от конструктивных особенностей выделяют основные типы частотных преобразователей 220/380 – индукционные и электронные. К первому варианту относят асинхронные разновидности электрических двигателей, особенностью которых является применение схемы с фазным ротором.
А вот электронный вариант может быть использован как при функционировании асинхронных движков, так и модификаций синхронного вида. Управление двигателями производится несколькими принципиально различающимися способами:
Посредством скалярного управления, исходя из линейных закономерностей. В этом случае учитывается пропорциональная зависимость амплитуды от частоты. Если частота меняется, то амплитуда входного напряжения также будет изменяться. В результате это влияет на крутящий момент, КПД, и уровень мощности.
Задание равномерности момента нагрузки обеспечивается постоянством соотношения амплитуды с выходной частотой. Преобразующее устройство и формирует указанное равновесие.
При векторном подходе момент нагрузки постоянен при любых пределах частотных изменений. Это позволяет получить большую точность регулирования. Возрастает и гибкость реагирования электропривода на скачки в выходной нагрузке. Частотный преобразователь для асинхронного двигателя обеспечивает постоянный контроль над моментом вращения.
Важно помнить, что фаза тока статора, которая меняется под действием магнитного поля, и представляет собой вектор тока. Он управляет моментом вращения
Таким образом, в этом случае используется амплитудная или широтно-импульсная система регулировки сигнала.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Как рассчитать передаточное число
Шестерня и колесо имеют разное количество зубов с одинаковым модулем и пропорциональный размер диаметров. Передаточное число показывает, сколько оборотов совершит ведущая деталь, чтобы провернуть ведомую на полный круг. Зубчатые передачи имеют жесткое соединение. Передающееся количество оборотов в них не меняется. Это негативно сказывается на работе узла в условиях перегрузок и запыленности. Зубец не может проскользнуть, как ремень по шкиву и ломается.
Расчет без учета сопротивления
В расчете передаточного числа шестерен используют количество зубьев на каждой детали или их радиусы.
u12 = ± Z2/Z1 и u21 = ± Z1/Z2,
Где u12 – передаточное число шестерни и колеса;
Z2 и Z1 – соответственно количество зубьев ведомого колеса и ведущей шестерни.
Знак «+» ставится, если направление вращения не меняется. Это относится к планетарным редукторам и зубчатым передачам с нарезкой зубцов по внутреннему диаметру колеса. При наличии паразиток – промежуточных деталей, располагающихся между ведущей шестерней и зубчатым венцом, направление вращения изменяется, как и при наружном соединении. В этих случаях в формуле ставится «–».
При наружном соединении двух деталей посредством расположенной между ними паразитки, передаточное число вычисляется как соотношение количества зубьев колеса и шестерни со знаком «+». Паразитка в расчетах не участвует, только меняет направление, и соответственно знак перед формулой.
Обычно положительным считается направление движения по часовой стрелке. Знак играет большую роль при расчетах многоступенчатых редукторов. Определяется передаточное число каждой передачи отдельно по порядку расположения их в кинематической цепи. Знак сразу показывает направление вращения выходного вала и рабочего узла, без дополнительного составления схем.
Вычисление передаточного числа редуктора с несколькими зацеплениями – многоступенчатого, определяется как произведение передаточных чисел и вычисляется по формуле:
u16 = u12×u23×u45×u56 = z2/z1×z3/z2×z5/z4×z6/z5 = z3/z1×z6/z4
Зубчатое зацепление жесткое. Детали не могут проскальзывать относительно друг друга, как в ременной передаче и менять соотношение количества вращений. Поэтому на выходе обороты не изменяются, не зависят от перегруза. Верным получается расчет скорости угловой и количества оборотов.
КПД зубчатой передачи
Для реального расчета передаточного отношения, следует учитывать дополнительные факторы. Формула действительна для угловой скорости, что касается момента силы и мощности, то они в реальном редукторе значительно меньше. Их величину уменьшает сопротивление передаточных моментов:
- трение соприкасаемых поверхностей;
- изгиб и скручивание деталей под воздействием силы и сопротивление деформации;
- потери на шпонках и шлицах;
- трение в подшипниках.
Для каждого вида соединения, подшипника и узла имеются свои корректирующие коэффициенты. Они включаются в формулу. Конструктора не делают расчеты по изгибу каждой шпонки и подшипника. В справочнике имеются все необходимые коэффициенты. При необходимости их можно рассчитать. Формулы простотой не отличаются. В них используются элементы высшей математики. В основе расчетов способность и свойства хромоникелевых сталей, их пластичность, сопротивление на растяжение, изгиб, излом и другие параметры, включая размеры детали.
Что касается подшипников, то в техническом справочнике, по которому их выбирают, указаны все данные для расчета их рабочего состояния.
При расчете мощности, основным из показателей зубчатых зацепления является пятно контакта, оно указывается в процентах и его размер имеет большое значение. Идеальную форму и касание по всей эвольвенте могут иметь только нарисованные зубья. На практике они изготавливаются с погрешностью в несколько сотых долей мм. Во время работы узла под нагрузкой на эвольвенте появляются пятна в местах воздействия деталей друг на друга. Чем больше площадь на поверхности зуба они занимают, тем лучше передается усилие при вращении.
Все коэффициенты объединяются вместе, и в результате получается значение КПД редуктора. Коэффициент полезного действия выражается в процентах. Он определяется соотношением мощности на входном и выходном валах. Чем больше зацеплений, соединений и подшипников, тем меньше КПД.
Что дает преобразователь?
Необходимость использования регулятора оборотов электродвигателя в случае асинхронных моделей состоит в следующем:
Достигается значительная экономия электрической энергии. Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.
Обеспечивается надежная защита всех механизмов. Преобразователь частоты позволяет контролировать не только температуру, но и давление и прочие параметры системы. Этот факт особенно важен, если при помощи двигателя приводится в действие насос.
Совершается плавный пуск. Благодаря регулятору снимается необходимость использования дополнительных электронных устройств. Частотный преобразователь легко настроить и получить желаемый эффект.
Снижаются расходы на техническое обслуживание, поскольку регулятор сводит к минимуму риски поломки привода и других механизмов.
Таким образом электродвигатели с регулятором оборотов оказываются надежными устройствами с широкой сферой применения.
Важно помнить, что эксплуатация любого оборудования на основе электрического мотора только тогда окажется правильной и безопасной, когда параметр частоты вращения будет адекватен условиям использования.