Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Как изготовить своими руками?
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
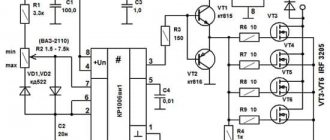
Вот схема его работы:
Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При изменении силы тока, эта частота может изменяться между 3 кГц и 5 кГц. Переменный резистор R2 служит для регулировки тока. При использовании электродвигателя в бытовых условиях, рекомендуется использовать регулятор стандартного типа.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:
На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Советуем к прочтению: Светодиодная гирлянда на микросхеме 27с512
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:
При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
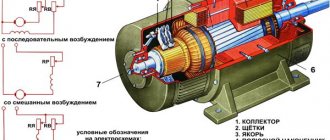
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Зачем они нужны
Множество бытовых приборов и электроинструментов не обходятся без коллекторного электродвигателя. Такая популярность подобного электродвигателя обусловлена универсальностью.
Для коллекторного электродвигателя может использование питание от тока постоянного или переменного напряжения. Дополнительным преимуществом является эффективный пусковой момент. При этом работа от постоянного или переменного тока электродвигателя сопровождается высокой частотой оборотом, что подходит далеко не всем пользователям. Чтобы обеспечить более плавный пуск и иметь возможность настраивать частоту вращения, используется регулятор оборотов. Простой регулятор вполне можно изготовить своими руками.
Но прежде чем будет обсуждаться схема, сначала нужно разобраться в коллекторных двигателях.
Коллекторные электродвигатели
Конструкция любого коллекторного двигателя включает несколько основных элементов:
Работа стандартного коллекторного электродвигателя основана на следующих принципах.
- Осуществляется подача тока от источника напряжения 220в. Именно 220 Вольт является стандартным напряжением бытовой сети. Для большинства приборов с электромоторами более 220 Вольт не требуется. Причем подача тока идет на ротор и статор, которые соединяются один с другим.
- В результате подачи тока от источника 220в образуется поле магнитное.
- Под воздействием магнитного напряжения начинается вращение ротора.
- Щетки осуществляют передачу напряжения непосредственно на ротор устройства. Причем щетки обычно изготавливают на основе графита.
- Когда направление тока в роторе или статоре меняется, вал вращается в обратную сторону.
Кроме стандартных коллекторных электродвигателей, существуют другие агрегаты:
- Электромотор последовательного возбуждения. Их устойчивость к перегрузкам более внушительная. Часто встречаются в бытовых электроприборах,
- Устройства параллельного возбуждения. У них сопротивление не отличается большими показателями, количество витков существенно больше, чем у аналогов,
- Однофазный электромотор. Его очень легко изготовить своими руками, мощность на приличном уровне, а вот коэффициент полезного действия оставляет желать лучшего.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
РН на 2 транзисторах
Данный вид применяется в схемах особо мощных регуляторов. В этом случае ток на нагрузку также передается через симистор, но управление ключевым выводом происходит через каскад транзисторов. Это реализуется так: переменным резистором регулируется ток, который поступает на базу первого маломощного транзистора, а тот через коллектор-эмиторный переход управляет базой второго мощного транзистора и уже он открывает и закрывает симистор. Это реализует принцип очень плавного управления огромными токами на нагрузке.
СНиП 3.05.06-85
Ответы на 4 самых частых вопроса по регуляторам:
- Какое допустимое отклонение выходного напряжения? Для заводских приборов крупных фирм, отклонение не будет превышать +-5%
- От чего зависит мощность регулятора? Выходная мощность напрямую зависит от источника питания и от симистора, который коммутирует цепь.
- Для чего нужны регуляторы 0-5 вольт? Эти приборы чаще всего используют для питания микросхем и различных монтажных плат.
- Зачем нужен бытовой регулятор 0-220 вольт? Они применяются для плавного включения и выключения бытовых электроприборов.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Причины и области применения ШИМ
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей. В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Советуем к прочтению: Транзисторы серий КТ315 и КТ 361
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени. Потери будут намного ниже, а КПД – намного выше.
В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции. Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.