Микросхема lm393 является удвоенным дифференцированным компаратором от производителя Texas Instruments. У прибора — цельный корпус из пластика. Внутри него расположены 2 операционных усилителя lm393, которые никак не связаны друг с другом. Их основная задача — сравнивать друг с другом все аналоговые сигналы, которые поступают на их входы.
Итогом работы этих элементов является возникновение выходного напряжения, либо, наоборот, его нулевое значение.
Данная статья представляет собой обзор микросхемы, ее технических характеристик, схемы включения lm393 и ее работы на примере обычной настольной лампы.
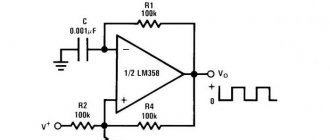
Lm393 генератор прямоугольных импульсов
Онлайн-калькулятор для расчета генератора:
Эта схема работает наподобие триггера Шмитта. Опорное напряжения компаратора зависит от его выходного напряжения. На картинке ниже показан принцип работы генератора на основе компаратора.
[Период выходного сигнала]
| Когда V1 достигает +λ*VCC, то на выходе происходит переключение к -VCC. Емкость конденсатора заряжается до +λ*C*VCC, и начинает разряжаться. |
Основное уравнение для определения заряда конденсатора, который имел начальный заряд:
Для этого случая V = -VCC, и q0 = λ*C*VCC, так что получится следующее выражение для заряда конденсатора:
Когда заряд q получит значение λ*VCC, произойдет другое переключение. Прошедшее время составит половину периода прямоугольного сигнала, T/2. Обратное переключение произойдет в нижней точке заряда:
Период сигнала может быть вычислен по формуле:
Обратите внимание, что хотя в выражениях содержится напряжение питания VCC (генератор переключает выходное напряжение от -VCC до +VCC), период переключения не зависит от его значения. Частоту генератора (период его сигнала T) можно менять с помощью значений емкости конденсатора C и резистора R.
Компаратор может быть заменен на любой операционный усилитель.
[Пример использования]
На компараторе LMV331 я собрал генератор автоматического огня для джойстика KEMPSTON. Компаратор LMV331 выполнен в миниатюрном 5-выводном корпусе SC70, поэтому схема легко поместилась в корпусе джойстика.
Ниже на рисунке приведена схема генератора для автоматического огня. Подстроечный резистор 220 кОм позволяет регулировать частоту генератора в диапазоне от 0.7 Гц до 36 Гц, что вполне достаточно (максимальная частота, с которой человек обычно нажимает на кнопку «Огонь» джойстика, равна приблизительно 4 Гц).
Источник
Принципы измерения угла поворота робота с помощью датчика H206
Существует много способов определения угла поворота робота. Обычно для этих целей используют акселерометры или гироскопы. Но более дешевый способ, который использовали мы в нашем проекте – это установка датчиков H206 на оба колеса робота. Таким образом мы сможем узнать сколько оборотов сделало каждое колесо. На следующем рисунке показан принцип расчета угла поворота робота в соответствии с данным способом.
Когда мы только подали питание на робота предполагается что угол его поворота равен 0°. Если вращается левое колесо угол инкрементируется в отрицательную сторону, а если вращается правое колесо угол инкрементируется в положительную сторону. Для упрощения понимания рассмотрим диапазон углов от -90 до +90 как показано на выше приведенном рисунке. Поскольку оба колеса одинакового диаметра, то если одно колесо сделает один полный оборот, то робот повернется на угол 90°.
К примеру, если левое колесо сделает полный оборот (80 прерываний), то робот повернется на 90° влево. Аналогично, если правое колесо сделает полный оборот (80 прерываний), то робот повернется на -90° вправо. То есть если плата Arduino обнаружит 80 прерываний от одного колеса, то мы можем считать что робот повернулся на 90° в соответствующую сторону, поэтому для расчета углов поворота мы можем использовать формулу:
Arduino
| 1 2 | int angle_left = (left_intr % 360) * (90/80); int angle_right = (right_intr % 360) * (90/80); |
90 в этой формуле обозначает угол, покрываемый за 80 прерываний. Мы также используем модуль по основанию 360 чтобы результирующее значение никогда не превышало 36. Когда мы рассчитаем по приведенной формуле углы поворота вправо и влево, то результирующий угол поворота мы можем найти с помощью разницы между этими углами:
Arduino
| 1 | angle = angle_right — angle_left; |
Texas Instruments CD4001B CD40106B LM311 LM339-N LM393
Приведены схемы несложных устройств, позволяющих регулировать ширину сигналов, снимаемых с внешних генераторов импульсов, в пределах от 0 до 100%
Регуляторы ширины цифровых сигналов чаще всего используют в цепях управления работой преобразовательной техники, различного рода регуляторах, в усилителях D-класса и т.д.
Классические регуляторы ширины сигналов, синтезируемых генераторами импульсов, достаточно хорошо известны и изучены. Известны и их недостатки, связанные с тем, что одновременно с изменением коэффициента заполнения импульса D изменяется и частота генерации. Казалось бы, что более предпочтительно менять в заданных пределах ширину уже сформированного импульсного сигнала от внешнего генератора. Однако при анализе доступных источников патентно-технической информации найти таковые устройства не удалось. Расширители/сжиматели импульсов не решали поставленную задачу.
| Рисунок 1. | Регулятор ширины 0…100% импульсов внешнего генератора на КМОП-микросхемах. | |
На представленных ниже Рисунках 1–4 показаны варианты управления шириной выходного сигнала в пределах от 0 до 100%. Для полноценной реализации идеи управления желательно, чтобы скважность входного сигнала была близка к 2, хотя некоторые из схем допускают возможность сохранения работоспособности устройств при существенном отклонении от выдвинутого условия. Вторая особенность схем управления – они могут работать в ограниченном диапазоне частот входного сигнала.
| Рисунок 2. | Регулятор ширины импульсов на операционном усилителе LM339. | |
На Рисунке 1 приведен вариант схемы плавного регулирования ширины 0…100% импульсов, снимаемых с внешнего генератора. Работа устройства основана на динамическом сравнении уровней напряжения на обкладках конденсатора С1 при периодических зарядно-разрядных процессах. Элемент DD1.1 не является обязательным и предназначен лишь для обеспечения стабильности амплитуды импульсов на его выходе. Устройство работает в диапазоне частот 10…200 кГц при коэффициенте заполнения входных импульсов 50%. Особенностью схем регуляторов здесь и далее является то, что с ростом частоты равный диапазон регулировки ширины выходных импульсов от 0 до 100% достигается во все более узком диапазоне регулировки движка потенциометра (R2 – Рисунки 1, 2 или R3 – Рисунки 3, 4).
| Рисунок 3. | Регулятор ширины импульсов на компараторе LM311. | |
Второй вариант регулятора ширины импульсов (Рисунок 2) также основан на сравнении плавающих на обкладках конденсатора С1 напряжений.
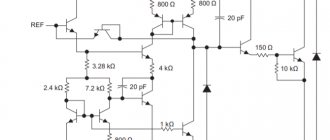
| Рисунок 4. | Балансный регулятор ширины импульсов на компараторе LM393. | |
Следующий вариант регулятора ширины импульсов (Рисунок 3) использует иную схему построения, хотя и его работа основана на периодических зарядно-разрядных процессах конденсатора С1 и сравнении уровней плавающих напряжении при помощи компаратора DA1 LM311. Для обеспечения крутых фронтов выходных импульсов предназначен инвертор на элементе DD1.2 CD40106.
| Рисунок 5. | Динамика переходных процессов на входах и выходе балансного регулятора ширины импульсов на компараторе LM393. | |
Завершает небольшую коллекцию регуляторов ширины сигналов, получаемых от внешних генераторов импульсов, балансный регулятор ширины импульсов, выполненный на компараторе LM393 (Рисунок 4). Устройство работает в диапазоне частот входных сигналов от 5 до 150 кГц. Динамика переходных процессов на входах и выходе балансного регулятора при нахождении движка регулятора (потенциометр R3) в его среднем положении показана на Рисунке 5, что соответствует коэффициенту заполнения импульсов выходного сигнала 50%.
Источник
Датчик скорости LM393 (H206)
Основную роль в нашем проекте играет датчик скорости LM393, поэтому кратко рассмотрим принцип его работы. Датчик скорости LM393 (H206) состоит из интегрированного в него инфракрасного датчика и микросхемы компаратора напряжения LM393, поэтому он и получил название датчика скорости LM393. Также в состав датчика входит пластина с сетчатой градуировкой, которую необходимо смонтировать на вращающейся оси двигателя. Внешний вид данного датчика показан на следующем рисунке.
ШИМ на компараторе LM393
Добрый день! Недавно стал интересоваться цифровой схемотехникой и незаметно перешёл к аналоговой. А почему так произошло? Во время проектирования динамической индикации на дискретной логике, появилась идея реализовать ШИМ. Идея интересная, но опыта особенно не было. Поэтому сразу возникла идея поставить микроконтроллер. Но это не так интересно, особенно когда цель учится. И так спустя некоторое время я пришёл к тому, что можно реализовать ШИМ на компараторах.
Концепция ШИМ состоит в том, что есть пилообразный сигнал который поступает на вход компаратора и сигнал с делителя напряжения. И в момент возникновения пересечения, выставляется сигнал на выходе компаратора. Чем ближе напряжение с делителя к пику пилы, тем меньше время высокого сигнала и наоборот.
Задача была сгенерировать пилообразный сигнал. Для этого я решил собрать релаксационный генератор на компараторе. Но особенность его заключается в том, чтобы он был с маленькой скважностью (то есть 90-95% высокий уровень и 5-10% низкий). Это нужно для того, чтобы размах для регулировки ШИМ был практически полным. В ином случае будет доступно только 50% и не более (если генератор со скважностью 50%). И для создания низкой скважности была использована схема разрядки RС цепочки через диод и резистор (резистором R2 задаётся соотношение высокого и низкого уровня).
А затем с помощью интегрирующей (RC) цепочки необходимо сделать пилу. Во время тестирования возникла идея вместо резистора в RC цепочке, использовать источник тока на двух транзисторах. Это было сделано для равномерной зарядки конденсатора. А быстрая разрядка происходит благодаря диоду.
Теперь когда есть источник пилообразного сигнала, не составит труда создать ШИМ сигнал. Для этого необходимо на инвертирующий вход компаратора подать напряжения с делителя. Но тут возникает проблема в том, что для регулировки используется фоторезистор. Его особенность в том, что на свету его сопротивление порядка 1 килоома или нескольких, а в темноте достигает 2-3 мегаомов.
Принципы измерения пройденной дистанции с помощью датчика H206
Как мы уже знаем, в нашем проекте плата Arduino за время полного оборота колеса обнаружит 40 прерываний. Очевидно, что расстояние, пройденное роботом за один оборот колеса, будет равно длине его окружности. Поскольку мы знаем радиус колеса, следовательно, мы можем рассчитать и пройденную дистанцию по следующей формуле:
Arduino
| 1 2 | Distance = 2πr * number of rotations distance = (2*3.141*radius_of_wheel) * (left_intr/40) |
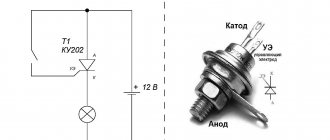
Питание мощных светодиодов от 12 вольт на микросхеме LM393
Микросхема LM358 как написано в его DataSheet является универсальным решением, так как схема включения большинства популярных устройств весьма проста, в случаях отсутствия жестких требований к высокому быстродействию, рассеиваемой мощности и нестандартному питающему напряжению. Небольшая стоимость, отсутствие необходимости подключения дополнительных элементов частотной коррекции, возможность использования во всем диапазоне стандартных питающих напряжений (до +32В) и низкий потребляемый ток, делают его кандидатом номер один для электронных проектов с ОУ.
Входное напряжение смещения и гистерезис
Для большинства схем построенных на компараторах, величина гистерезиса является разностью напряжений входного сигнала, при котором выход компаратора либо полностью включен или полностью выключен. Гистерезис в компараторах, как правило, нежелателен, но он может потребоваться, когда необходимо уменьшить чувствительность к шуму или при медленном изменении входного сигнала.
Внешний гистерезис использует положительную обратную связь (ПОС) с выхода на неинвертирующий вход компаратора. В результате полученный триггер Шмитта обеспечивает дополнительную помехоустойчивость и более чистый выходной сигнал.
Эффект от использования гистерезиса в том, что при постепенном изменении входного напряжения, а опорное напряжение будет быстро изменяться в противоположном направлении. Это обеспечивает чистое переключение выхода компаратора.
Механический аналог гистерезиса может быть обнаружен в разнообразных тумблерах. Как только рукоятка тумблера перемещается мимо центральной точки, пружина в тумблере переводит контакты реле в гарантированное положение (открытое или закрытое).
Читать также: Обжим 100 мбит 4 жилы
Гистерезис является неотъемлемой частью большинства компараторов составляющая всего несколько милливольт и он обычно влияет только на схемы, где входное напряжение поднимается или падает очень медленно или имеет скачки напряжения, известные как «шум»…
Автор: Сергей · Опубликовано 27.01.2017 · Обновлено 10.07.2019
Модуль освещенности на LM393, используется для измерения интенсивности света в различных устройствах, таких как, автоматизация света (включении света ночью), роботах (определения дня или ночи) и приборов контролирующих уровень освещенности. Измерения осуществляется с помощью светочувствительного элемента (фоторезистора), который меняет сопротивление в зависимости от освещенности.
Технические параметры
5.5 В ► Потребляемый ток: 10 мА ► Цифрового выход: TTL (лог 1 или лог 0) ► Аналогового выход: 0 В … Vcc ► Диаметр монтажного отверстия: 2.5 мм ► Выходной ток: 15 мА ► Габариты: 42мм х 15мм х 8мм
Общие сведения
Существует два модуля, визуально отличие только в количестве выводов (3 pin и 4 pin), дополнительный вывод добавлен, для снятие прямых показаний с фоторезистора (аналоговый выход), в статье пойдет речь о четырех контактом варианте модуля. В этих двух модулей, измерение осуществляется с помощью фоторезистора, который изменяет напряжение в цепи в зависимости от количества света, попадающего на него. Чтобы представить, как свет будет влиять на фоторезистор, приведу краткую таблицу.
Модуль освещенности с четырьмя выводами содержит два выходных контакты, аналоговый и цифровой и два контакта для подключения питания. Для считывания аналогово сигнала предусмотрен отдельный вывод «AO», с которого можно считать показания напряжения с 0 В … 3.3 В или 5 В в зависимости от используемого источника питания. Цифровой вывод DO, устанавливается в лог «0» или лог «1», в зависимости от яркости, чувствительность выхода, можно регулировать с помощью поворотного потенциометра. Выходной ток цифрового выхода, способен выдать более 15 мА, что очень упрощает использования модуля и дает возможность использовать его минуя контроллер Arduino и подключая его напрямую ко входу однокональному реле или одному из входов двухконального реле. Принципиальную схему модуля освещенности на LM393 с 3 pin и 4 pin, показана ниже.
Принципиальная схема модуля освещенности на LM393 с 4 pin
Принципиальная схема модуля освещенности на LM393 с 3 pin
Теперь, как же работает схема, фоторезистор показан Foto (IN). Основная микросхема модулей, это компаратор LM393 (U1), который производит сравнение уровней напряжений на входах INA- и INA+. Чувствительность порога срабатывания задается с помощью потенциометром R2 и в результате сравнений на выходе D0 микросхемы U1, формируется лог «0» или лог «2», который поступает на контакт D0 разъема J1.
Работа схемы
Схема робота на основе Arduino и датчика скорости LM393 представлена на следующем рисунке.
Вычислительные и управляющие задачи в схеме возложены на плату of Arduino Nano. Колеса робота приводятся в движение двумя электродвигателями постоянного тока при помощи драйвера двигателя на основе H-моста L298N. Джойстик используется для управления скоростью и направлением движения робота, а два датчика скорости H206 используются для измерения скорости, пройденной дистанции и угла поворота робота. Измеренные значения этих параметров отображаются на экране ЖК дисплея 16×2. Потенциометр, подключенный к ЖК дисплею, можно использовать для управления его контрастностью, а резистор служит для ограничения тока для управления яркостью подсветки дисплея.
Схема запитывается от литиевого элемента на 7.4V. Эти 7.4V подаются на контакт 12V драйвера двигателя, а регулятор напряжения драйвера двигателя преобразует их в стабилизированное напряжение +5V, которое используется для питания платы Arduino, ЖК дисплея, датчиков и джойстика.
Двигатели управляются с помощью цифровых контактов 8, 9, 10 и 11 платы Arduino. Поскольку нам необходимо управлять еще и скоростью вращения двигателей мы используем сигналы ШИМ (широтно-импульсной модуляции), подаваемые на положительные контакты двигателей. Для этой цели мы используем контакты 9 и 10 платы Arduino, на которых возможно использование ШИМ сигналов. Значения положения осей X и Y джойстика подаются на аналоговые контакты A2 и A3 соответственно.
Поскольку, как мы уже знаем, датчик H206 формирует управляющее воздействие (триггер) каждый раз когда обнаруживается отверстие в пластине с делениями. Для повышения точности определения скорости мы эти управляющие воздействия будем подавать на входы внешних прерываний на контактах 2 и 3 платы Arduino. После сборки робота у нас получилась конструкция показанная на следующем рисунке. Более подробно вы ее можете рассмотреть на видео, приведенном в конце статьи.
Технические характеристики
Ниже указаны предельные допустимые значения условий эксплуатации для диапазона рабочих температур окружающей среды TA от 0 до +70 °C, если не указано иное.
Основные электрические характеристики, при температуре окружающей среды TA = 25 °C.
Рекомендуемые условия эксплуатации в диапазоне рабочих температур окружающей среды, если не указано иное:
Подверженность устройства повреждению от электростатического разряда (ESD):
Также у данного устройства есть тепловые характеристики:
Описание и применение операционного усилителя LM358. Схемы включения, аналог, datasheet
Микросхема LM358 в одном корпусе содержит два независимых маломощных операционных усилителя с высоким коэффициентом усиления и частотной компенсацией. Отличается низким потреблением тока. Особенность данного усилителя – возможность работать в схемах с однополярным питанием от 3 до 32 вольт. Выход имеет защиту от короткого замыкания.
Описание операционного усилителя LM358
Область применения — в качестве усилительного преобразователя, в схемах преобразования постоянного напряжения, и во всех стандартных схемах, где используются операционные усилители, как с однополярным питающим напряжением, так и двухполярным.
Технические характеристики LM358
- Однополярное питание: от 3 В до 32 В.
- Двухполярное питание: ± 1,5 до ± 16 В.
- Ток потребления: 0,7 мА.
- Синфазное входное напряжение: 3 мВ.
- Дифференциальное входное напряжение: 32 В.
- Синфазный входной ток: 20 нА.
- Дифференциальный входной ток: 2 нА.
- Дифференциальный коэффициент усиления по напряжению: 100 дБ.
- Размах выходного напряжения: от 0 В до VCC — 1,5 В.
- Коэффициент гармонических искажений: 0,02%.
- Максимальная скорость нарастания выходного сигнала: 0,6 В/мкс.
- Частота единичного усиления (с температурной компенсацией): 1,0 МГц.
- Максимальная рассеиваемая мощность: 830 мВт.
- Диапазон рабочих температур: 0…70 гр.С.
Габаритные размеры и назначения выводов LM358 (LM358N)
Аналоги LM358
Ниже приведен список зарубежных и отечественных аналогов операционного усилителя LM358:
- GL358
- NE532
- OP221
- OP290
- OP295
- TA75358P
- UPC358C
- AN6561
- CA358E
- HA17904
- КР1040УД1 (отечественный аналог)
- КР1053УД2 (отечественный аналог)
- КР1401УД5 (отечественный аналог)
Примеры применения (схемы включения) усилителя LM358
Простой неинвертирующий усилитель
Компаратор с гистерезисом
Допустим, что потенциал, поступающий на инвертирующий вход, плавно возрастает. При достижении его уровня чуть выше опорного (Vh -Vref), на выходе компаратора возникнет высокий логический уровень. Если после этого входной потенциал начнет медленно снижаться, то выход компаратора переключится на низкий логический уровень при значении немного ниже опорного (Vref – Vl). В данном примере разница между (Vh -Vref) и (Vref – Vl) будет значение гистерезиса.
Генератор синусоидального сигнала с мостом Вина
Мостовой генератор Вина (Wien bridge oscillator) — является одним из видов электронного генератора, который генерирует волны синусоидальной формы. Он может генерировать широкий спектр частот. Генератор основан на мостовой схеме, изначально разработанной Максом Виеном в 1891 году. Класический генератор Вина состоит из четырех резисторов и двух конденсаторов. Генератор можно также рассматривать в качестве прямого усилителя в сочетании с полосовым фильтром, который обеспечивает положительную обратную связь.
Дифференциальный усилитель на LM358
Назначение данной схемы — усиление разности двух входящих сигналов, при этом каждый из них умножается на определенную постоянную величину.
Дифференциальный усилитель — это хорошо известная электрическая схема, применяемая для усиления разности напряжений 2-х сигналов, поступающих на его входы. В теоретической модели дифференциального усилителя величина выходного сигнала не зависит от величины каждого отдельного входного сигнала, а зависит строго от их разности.
Функциональный генератор
Данный функциональный генератор вырабатывает сигналы треугольной и прямоугольной формы.
Генератор прямоугольных импульсов на LM358
В качестве примера использования приведем схему микрофонного усилителя на LM358:
Datasheet LM35
Тестирование работы робота
После того как аппаратная часть проекта будет готова, загрузите программу в плату Arduino. После этого возьмите в руки джойстик и попробуйте управлять роботом – во время этого процесса на экран ЖК дисплея будет выводиться информация о скорости, пройденном пути и угле поворота робота.
На экране ЖК дисплея величины Lt и Rt будут представлять собой счетчики прерывания слева и справа соответственно. Значения этих счетчиков будут инкрементироваться при каждом обнаружения отверстия (пропуска) в пластине датчика скорости. Параметр S на экране дисплея будет информировать о скорости робота в м/с, а параметр D будет показывать величину пройденного пути в метрах. Когда робот стоит прямо, для него угол поворота будет отображаться равным 0°, при повороте робота против часовой стрелки угол будет становиться отрицательным, а при повороте робота по часовой стрелке – положительным.
Более подробно все эти процессы вы можете посмотреть на видео, приведенном в конце статьи.
Описание и применение операционного усилителя LM358. Схемы включения, аналог, datasheet
Микросхема LM358 в одном корпусе содержит два независимых маломощных операционных усилителя с высоким коэффициентом усиления и частотной компенсацией. Отличается низким потреблением тока. Особенность данного усилителя – возможность работать в схемах с однополярным питанием от 3 до 32 вольт. Выход имеет защиту от короткого замыкания.
Описание операционного усилителя LM358
Область применения — в качестве усилительного преобразователя, в схемах преобразования постоянного напряжения, и во всех стандартных схемах, где используются операционные усилители, как с однополярным питающим напряжением, так и двухполярным.
Технические характеристики LM358
- Однополярное питание: от 3 В до 32 В.
- Двухполярное питание: ± 1,5 до ± 16 В.
- Ток потребления: 0,7 мА.
- Синфазное входное напряжение: 3 мВ.
- Дифференциальное входное напряжение: 32 В.
- Синфазный входной ток: 20 нА.
- Дифференциальный входной ток: 2 нА.
- Дифференциальный коэффициент усиления по напряжению: 100 дБ.
- Размах выходного напряжения: от 0 В до VCC — 1,5 В.
- Коэффициент гармонических искажений: 0,02%.
- Максимальная скорость нарастания выходного сигнала: 0,6 В/мкс.
- Частота единичного усиления (с температурной компенсацией): 1,0 МГц.
- Максимальная рассеиваемая мощность: 830 мВт.
- Диапазон рабочих температур: 0…70 гр.С.
Габаритные размеры и назначения выводов LM358 (LM358N)
Аналоги LM358
Ниже приведен список зарубежных и отечественных аналогов операционного усилителя LM358:
- GL358
- NE532
- OP221
- OP290
- OP295
- TA75358P
- UPC358C
- AN6561
- CA358E
- HA17904
- КР1040УД1 (отечественный аналог)
- КР1053УД2 (отечественный аналог)
- КР1401УД5 (отечественный аналог)
Аналоги
Аналогами LM358 можно считать микросхемы в которых указываются идентичные характеристики. К таким относятся: LM158, LM258, LM2904, LM2409. Эти микросхемы незначительно отличаются от описываемой своими тепловыми параметрами и подойдут в качестве замены для большинства проектов.
Для ее замены можно использовать: GL 358, NE 532, OP 04, OP 221, OP 290, OP 295, OPA 2237, TA7 5358-P, UPC 358C, AN 6561, CA 358E, HA 17904. Отечественные аналоги lm358: КР 1401УД5, КР 1053УД2, КР 1040УД1.
Для замены также может подойти аналог по электрическим параметрам, но уже c четырьмя ОУ в одной микросхеме — LM324.
LM358N(P) / LM358D — ОУ и Компараторы — МИКРОСХЕМЫ — Электронные компоненты (каталог)
| LM358N/LM358D — двухканальный операционный усилитель широкого применения для работы в бытовом диапазоне температур (0..+70°С). Микросхема ОУ LM358 по функциональному назначению и расположению выводов аналогична таким микросхемам как LM158, LM258, LM2904, но отличается от них температурным диапазоном работы и незначительно другими параметрами. Аналоги: КР1040УД1 / КФ1040УД1. Микросхема LM358N также может поставляться с маркировкой LM358P. | Предельные режимы LM358N/LM358D: |
| Входное напряжение | -0,3..+32V |
| Дифференциальное | 32V |
| Выходной ток | 40mA * |
| Диапазон температур | 0..+70°С |